It might be a rig meant for exporting to a game engine. Yet I"m trying to animate the robot in Blender walking from the middle of a room towards a table. I'm moving the Robot_rig_CTRL but how do I keep the feet planted in the same location between steps instead of having the feet skidding all over the place or making 1 key/frame to keep the foot planted on the ground?
Are you animating the armature in Pose mode or Object mode?
When you animate, you want to animate the controls INSIDE the armature object (in Pose mode)
There are also 2 types of walks. An "In-place" walk and a "Translating Walk"
The first kind looks like the character is walking on a treadmill. It will stay in the same spot but the feet will slide like he is on a treadmill. You can then animate the Root control (or the Armature object) moving forward at the correct speed and the feet will stick to the ground.
The other kind of walk has the forward movement actually built in to the controls. Meaning, that it actually moves forward like it is on the ground in the real world (not a treadmill).
The walk cycle that comes with the file is an 'in-place' walk with the Root control translating forward.
There is no automatic way to make this walk cycle fit your needs of walking from the middle of a room towards a table.
I'm animating in Pose mode, but I was planning on making 100% of the walk animation myself (no automation).
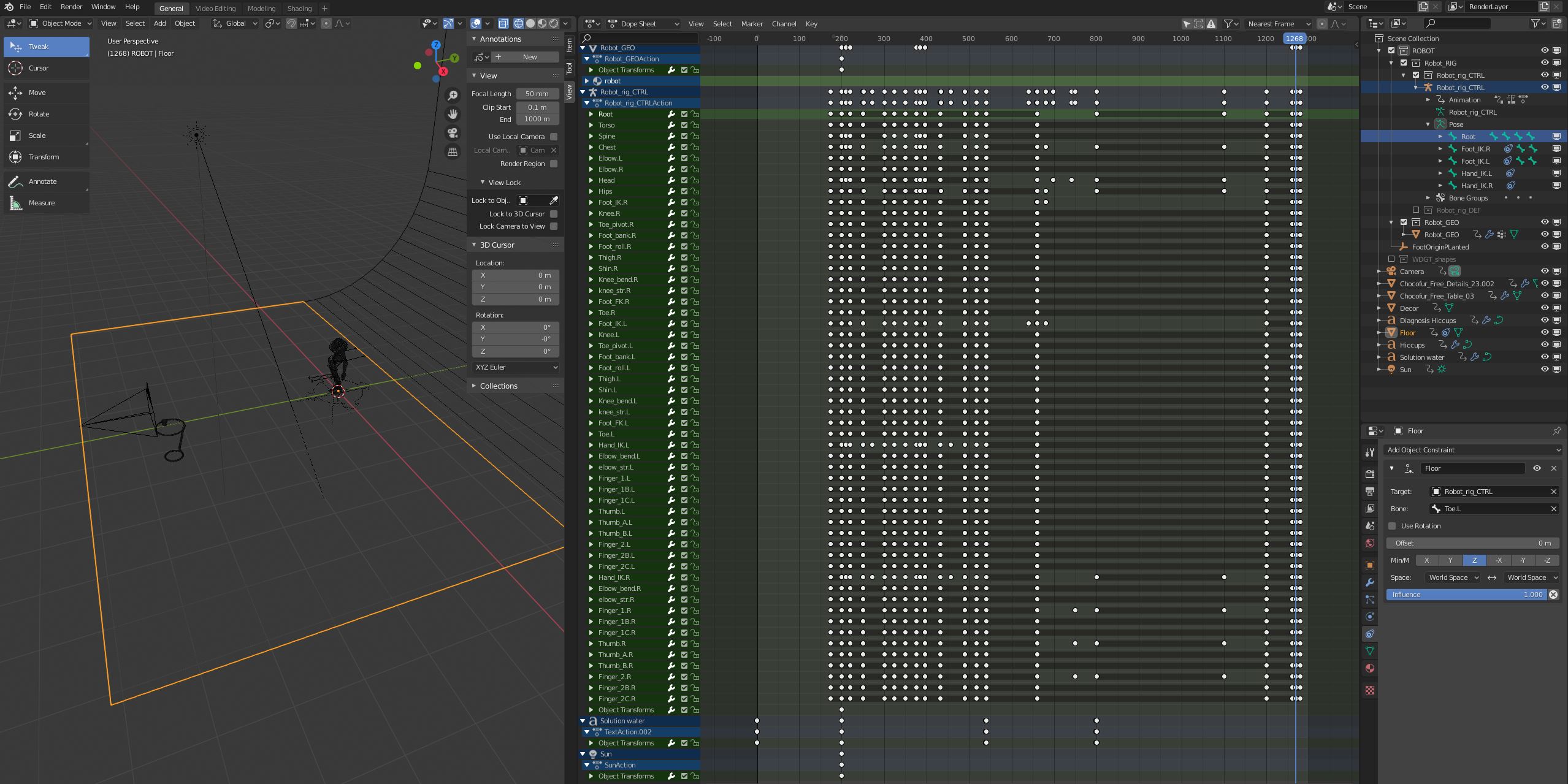
Moving the robot to leave the "Robot_rig_CTRL" (four arrows on a circle baseplate) makes te rig blow up, But when I move the Robot_rig_CTRL to the table getting the feet to hit the ground without skidding is near impossible.
I have tried to add a "Floor" and tried to set it as an animated constrained to the Toe in the foot, but somehow fidling with all the FK and IK and World influences seemed to have 0 effect om the rig: the toe did not stay put on the floor whenever I tried moving the Robot_rig_CTRL
 .
.
Either I'm doing something wrong by misusing the rig in a way it wasn't meant to be used, or I'm missing something.
Wait wait wait... I added a constraint to the Toe for the floor... and THAT seems to work.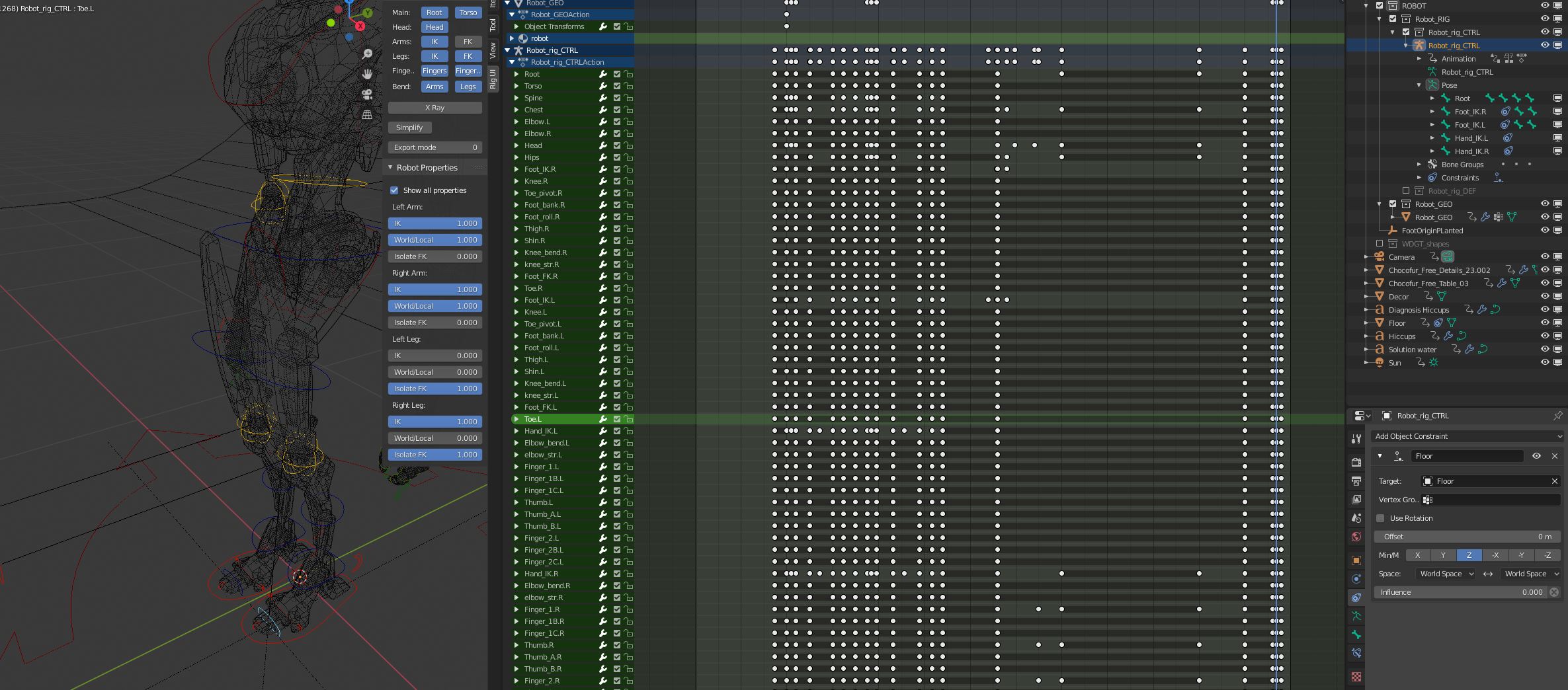
The "Robot_rig_CTRL" is the name for the entire armature object. From the looks of it you are moving the Root control to the table. That is the circle with four arrows on the ground. Moving the root will move the entire rig and its controls. So if you are going to use this method to move it around you will want to use the "in place" method Wayne described above. There are a few ways to go about it but the main thing you are going to need to make sure of is the pace of the walk matches the speed you are moving the root. Otherwise you will have the sliding feet issue you have now.
The other way, (in my opinion, the more beginner friendly way) is to move the rig around using the "Torso" control and translate each step yourself. This is the "translating walk" that Wayne describes above. This method will give you a better control over how the feet plant and stay in place.(Make sure both feet are set to IK and in World space, I notice in the screen shot the left leg is set to FK)
Wayne teaches both methods in the Animation Bootcamp ---> https://cgcookie.com/course/animation-bootcamp Check it out if you haven't. You won't regret it.
My final opinion, which might be an even better option for you. Your shot, and the telling of the story you have here might benefit better if you change the layout some. Right now it starts with a full shot of the robot (you can see the entire length of the body). Its just chillin' in the back with its hiccups. It sees the water and walks over to drink and remove said hiccups. The End
I don't think it would change your story if you started with the robot closer to the table in a medium shot (you can see the robot from the waist up). It sees the water and takes a few steps to drink and remove said hiccups. The End. This tells the same story and you don't have to worry about sliding feet because they are outside of view from the camera.
This, of course, is up to you. I don't want to get in the way of creative freedom. This is just something I might do to reduce some headaches.
Good Luck, happy animating.
Cheers
Hi hoxolotl.
Yeah as Phil mentioned - you are actually animating the Root control in your video. This will move the entire character (inside pose mode).
You will want to animate the Torso, Feet and all relevant parts to make the character walk. Just like you did to make the character hiccup.
I've been away, my excuses for the late reaction. Thanks for all the help.
I'll be going with the option to move the table and camera VS moving the robot... and _maybe_ scrap the scene where it runs around in panic at seeing an empty battery icon (scaring yourself is also one of the fables to get rid of hiccups). The whole script is a minute long with several scenes, this is just the start. I have filmed myself as reference and created a reference acted movie for all the scenes and I'm not going to share my acting :)